Maze Solving Robot
This crafty little robot is able to find their way out of a maze without falling into traps! The code was developed as part of a Robotics assignment, though I chose to implement some features that weren’t required on the brief like the robot trying to follow the left hand rule to escape the maze.
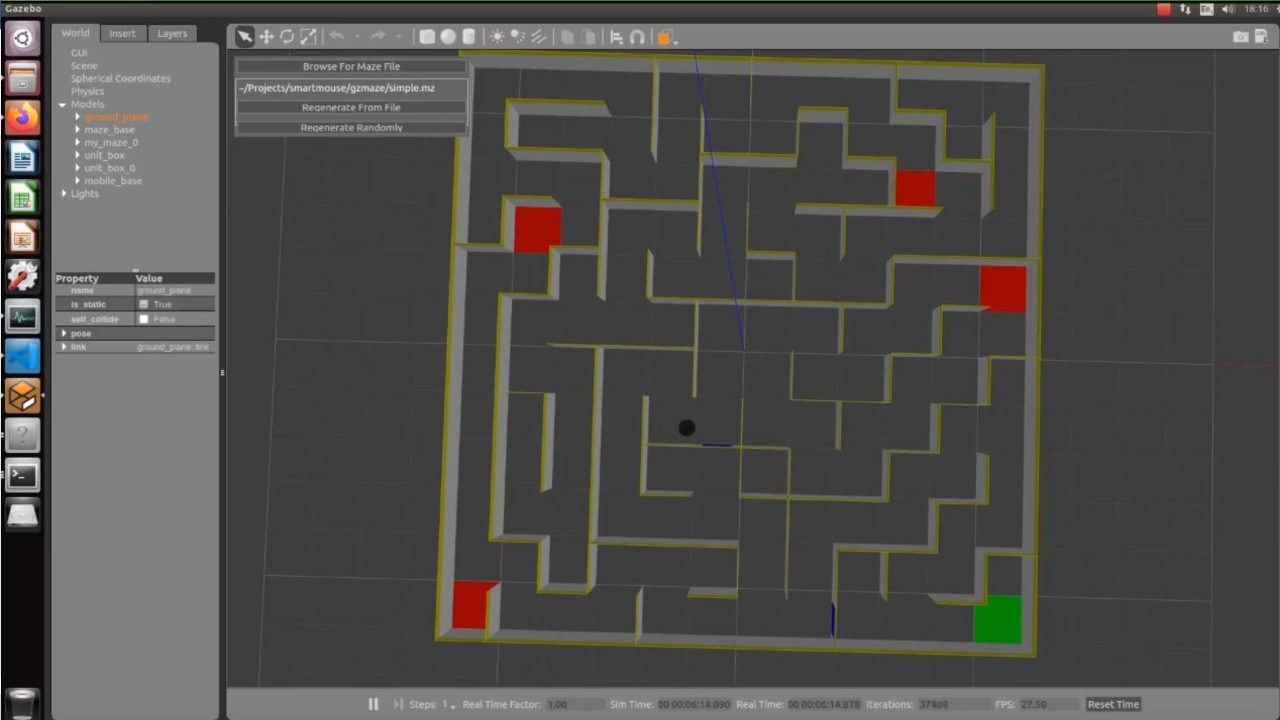
It uses ROS and OpenCV to navigate in a Gazebo simulation. Most of the code relies on the limited FOV laser sensor on the robot for navigation, and an RGB camera to look for the traps, if you’d like to have a poke around in the code I’ve included a link to the GitHub repository, as well as a video of this bad boy in action below.